
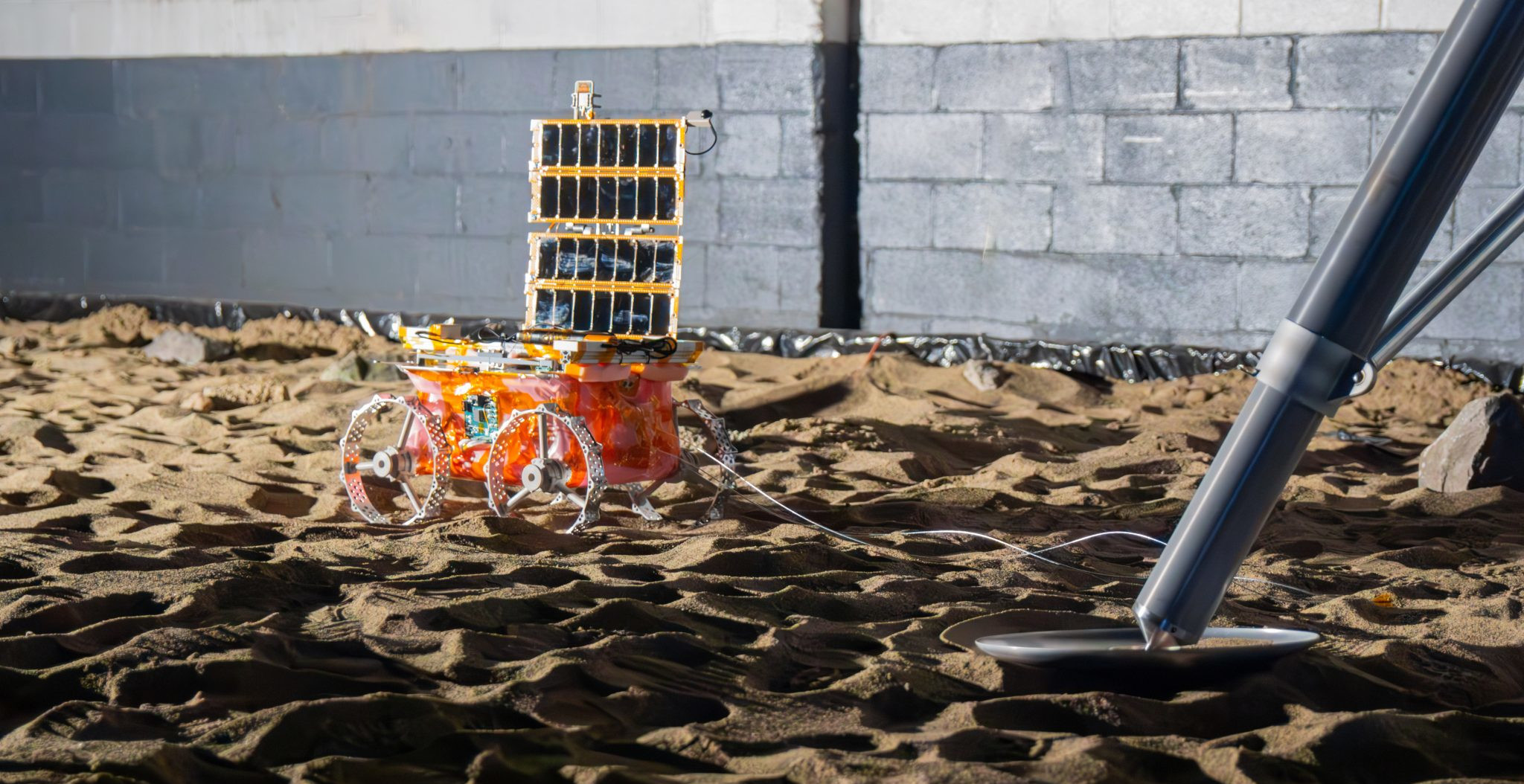
Lunar Rover Robotics
Architecture, Perception, Localization
Architecture, Perception, Localization
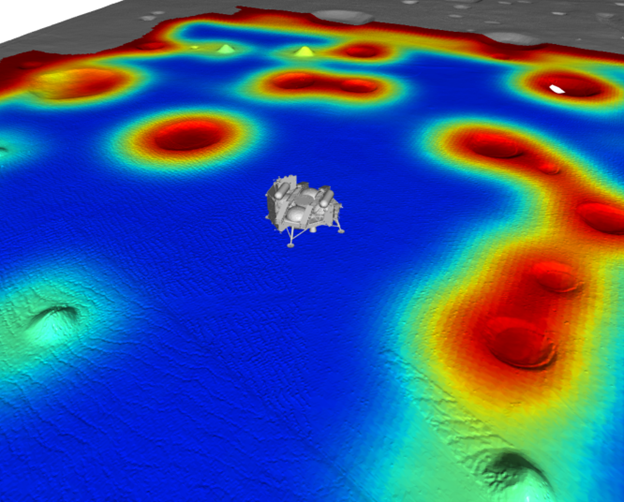
Critical in the loop LiDAR landing sensor
PyTorch, C++, Machine Learning, ROS 2

C++, ROS 2, Navigation, Underwater Robotics
C++, ROS 2, Nav2, Machine Learning, Unitree Go1

Python, ROS 2, OpenCV, Franka Emika Panda
C++, ROS 2, TurtleBot3
ROS 2 C++ Integration/Unit Testing
C, IMU, nRF52833

Arduino, KiCAD PCB Design